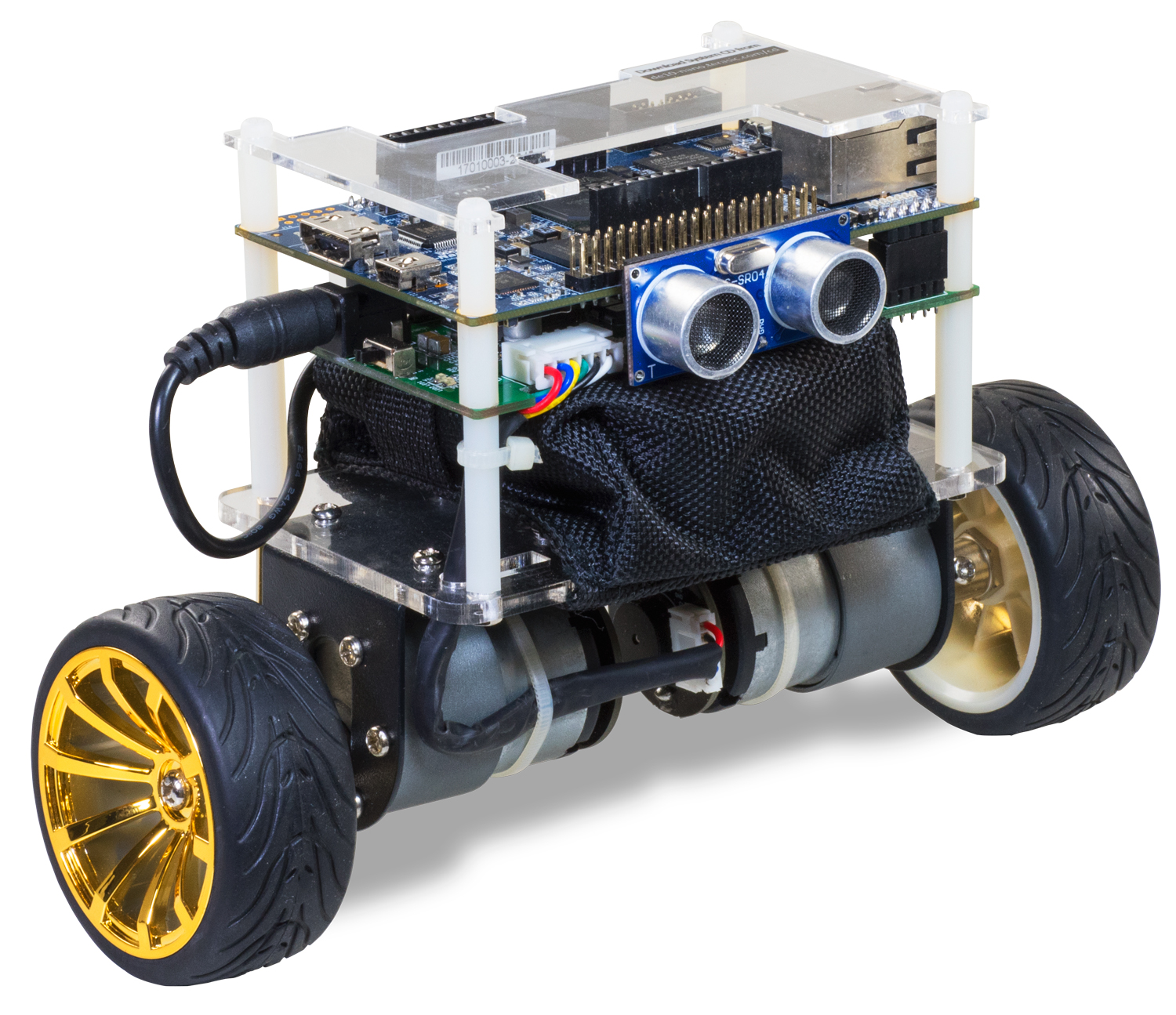
Self-balancing robot. It’ll blow your mind.
The project starts from choosing the MCU, reading raw IMU sensor values and using them in a PID controller to control the self-balancing robot. Watch video for demo.
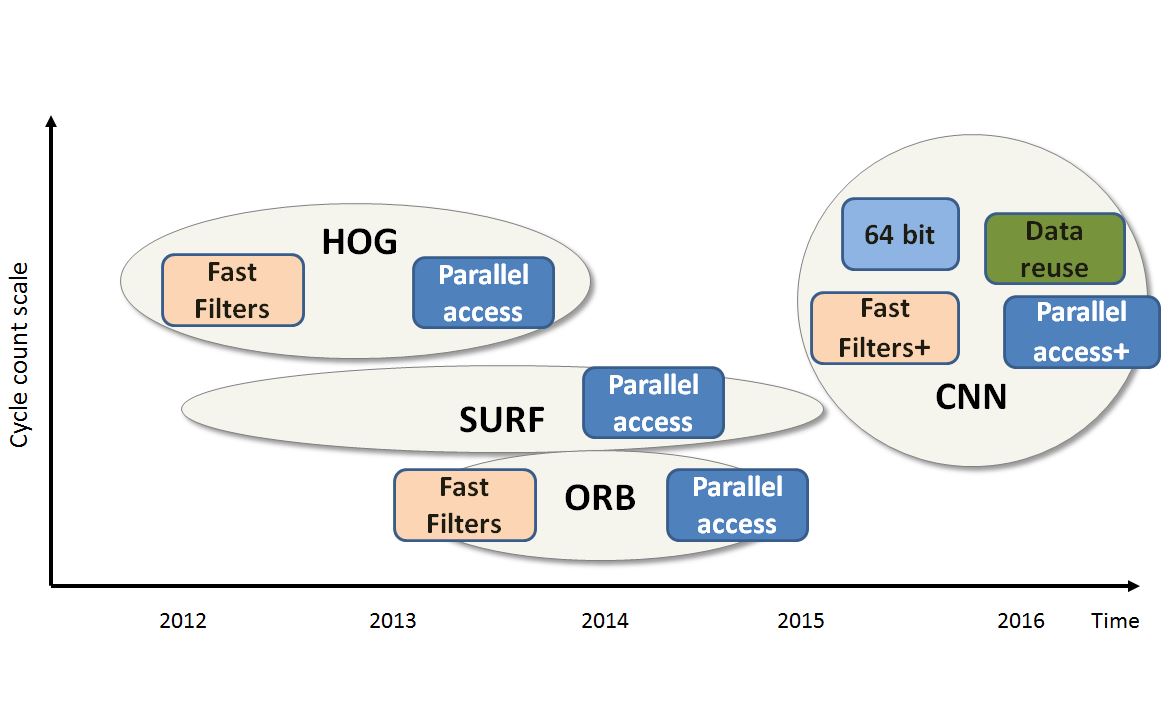
Feature detection, from SIFT, SURF and ORB to CNNs. Performance review!
What are image features? And why do we want to detect features in images? This blog will answer these questions plus many more. Watch video insert for demo.
CC13x0 Texas Instruments MCUs. Sub-1GHz wireless MCUs from TI.
In this blog, the CC13x0 is introduced. The setup of the development environment is described and the use of C and C++ in the development process is also clearly explained. With this knowledge, the blog goes on to implement several projects using the CC13x0; with an example project being a wireless sensor network demonstrated in the video insert.